
Postavite Marlin firmware i pokrenite ga!
- Prvi koraci
- Serijski priključci, brzina prijenosa podataka, bluetooth, prilagođeni naziv
- Stepper driver
- Homing bez senzora
- Microstepping i stealthchop
- PSU kontrola
- Termalne postavke - termistor i maks./min. temp
- PID postavke
- Sigurnost - hladna ekstruzija i toplinski odvod
- Mehaničke postavke - corexy, belt printer, robotska ruka
- Endstop postavke
- Postavke kretanja - ubrzanje, brzina napredovanja, koraci, linearno napredovanje
- Z-sonda i niveliranje kreveta
- veličina kreveta
- M600
- Dodatne značajke - EEPROM, postavke predgrijanja, čišćenje mlaznica, mjerač vremena ispisa, lozinka, jezik, podrška za SD karticu, osjetljivost kodera, zvučnici, LCD-i, neopixeli
Kratka napomena prije nego što počnemo - spomenut ću brojeve redaka kako bih lakše pronašao ispravan redak firmvera. Ovisno o firmveru koji koristite ili konfiguracijskim datotekama koje koristite, ovo se može malo razlikovati, ali pronalaženje pravog retka još uvijek je relativno lako popraviti.
Također, upute u Marlinu nazivaju se definicijama, mogu biti uključene, isključene ili + odabrane vrijednosti. Oni koji su uključeni su nekomentirani, tj. nemaju identifikator komentara, što je dvostruka kosa crta. U osnovi, dvostruka kosa crta isključuje sve i dopušta pisanje komentara ako želite personalizirati svoj firmware kako biste ga kasnije koristili vi ili drugi. Sve što je napisano s // na početku retka firmware će potpuno zanemariti prilikom kompajliranja.
1. Prvi koraci
Za uređivanje firmvera Marlin potreban vam je pravi softver. Iako postoji nekoliko opcija, većina bi koristila Visual Studio Code. Ovaj softver možete besplatno preuzeti ovdje, za Windows, Linux i Mac.
Za to će vam trebati i Platform IO proširenje. Nakon što je VS Code instaliran, idite na Extensions na alatnoj traci s lijeve strane (ikona s 4 kvadrata), potražite Platformio i kliknite Instaliraj. Također možete koristiti dodatak Auto-Build Marlin, koji će učiniti stvari malo bržima ako postavite svoju ploču s pravim procesorom, ali to možemo učiniti i na staromodan način. Kako to učiniti pokazat ćemo vam dalje u tekstu.
Nakon što ste sve skupili, potrebno je instalirati Marlin firmware. Stoga idite na Marlin GitHub i preuzmite najnoviju verziju.
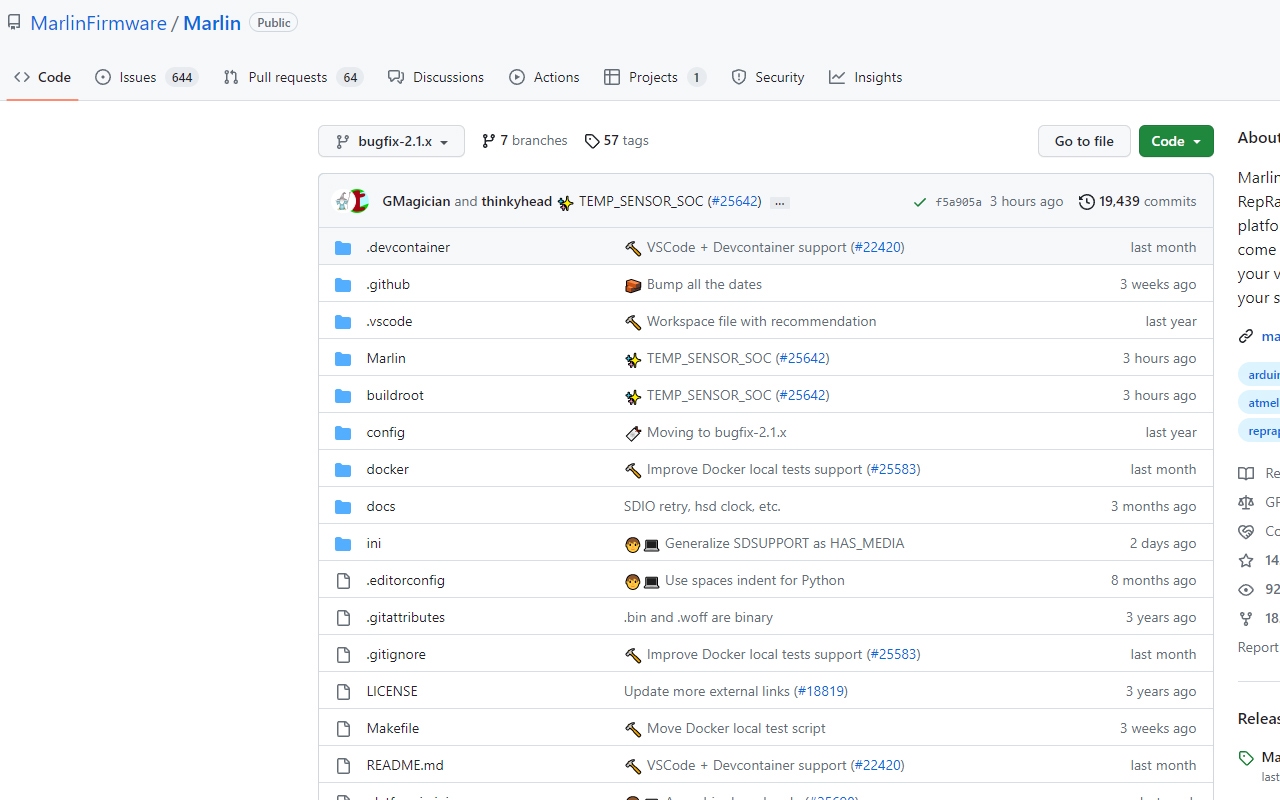
Vidjet ćete da postoji Bugfix i redovna verzija. Bugfix verzija sadrži najnovije promjene firmvera. Koristan je ali i najmanje stabilan jer se na njemu stalno radi. Međutim, Marlinov tim je vrlo dobar u pronalaženju i ispravljanju bugova i grešaka, tako da rado koristimo ove verzije.
Kliknite na kod u gornjem desnom kutu za preuzimanje firmvera kao zip, raspakirajte zip mapu i učitajte VS kod. Zatim idite na datoteku i otvorite mapu i Marlin firmware.
Sljedeće su konfiguracijske datoteke, specifične konfiguracije pisača također se mogu pronaći na GitHubu.
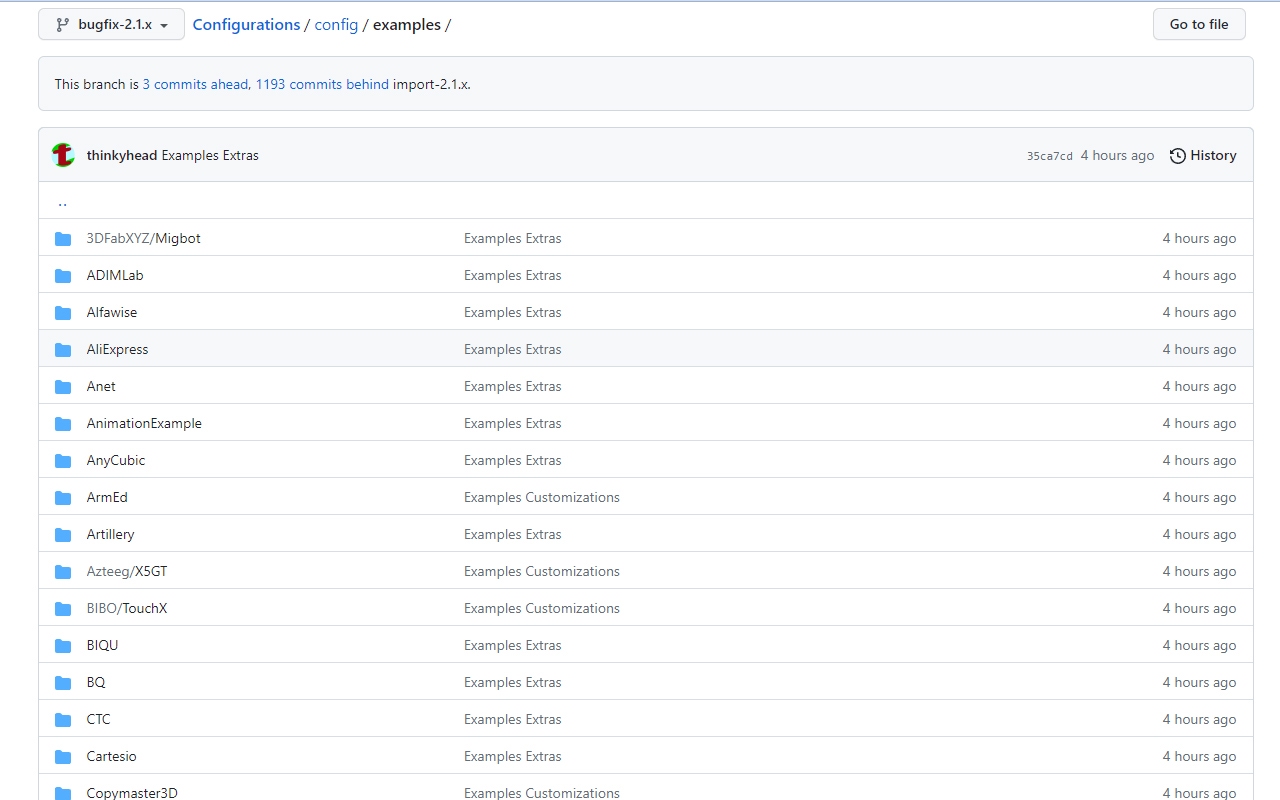
One su posebno korisne ako želite samo malo promijeniti firmware. Na primjer, ako posjedujete pisač, recimo Ender 3, i upravo ste nadogradili hotend i trebate promijeniti termistor u firmveru, možete jednostavno preuzeti konfiguracijske datoteke za taj pisač i zalijepiti ih u mapu Marlin koju ste upravo preuzeli . Na ovaj način, sve specifičnosti standardnog firmvera pisača su već prisutne i potrebno je promijeniti samo vrijednosti termistora.
Kada pripremate mapu firmvera za uređivanje, postoji jedna vrlo važna točka koju treba uzeti u obzir prije nego počnete uređivati, a to je odabir prave matične ploče i modela procesora.
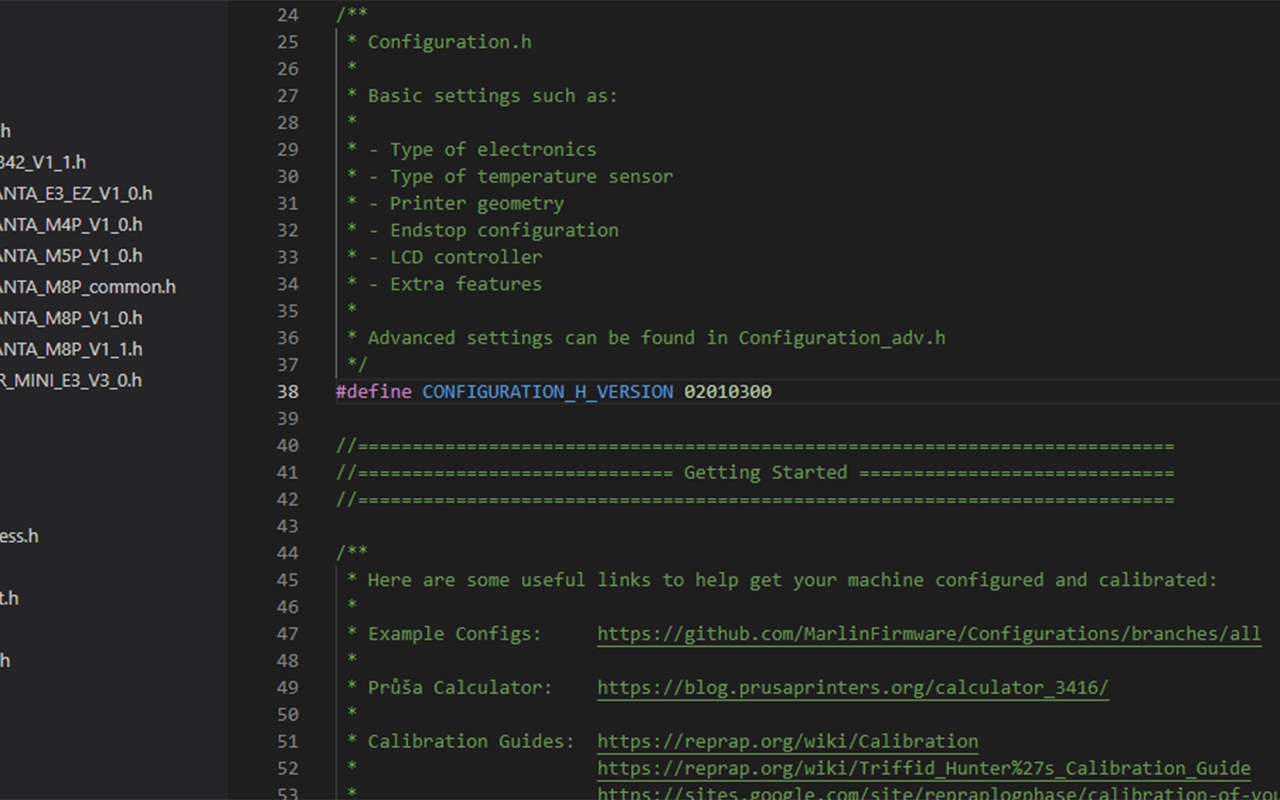
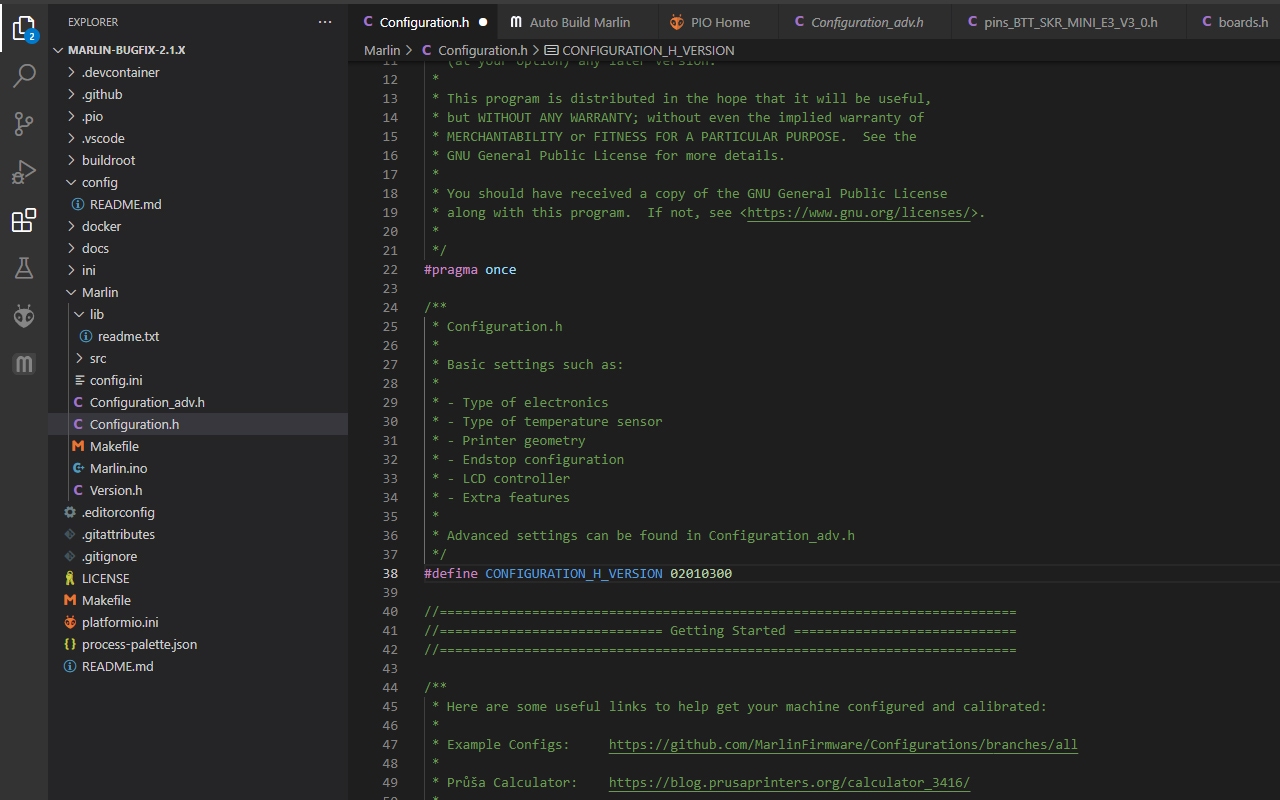
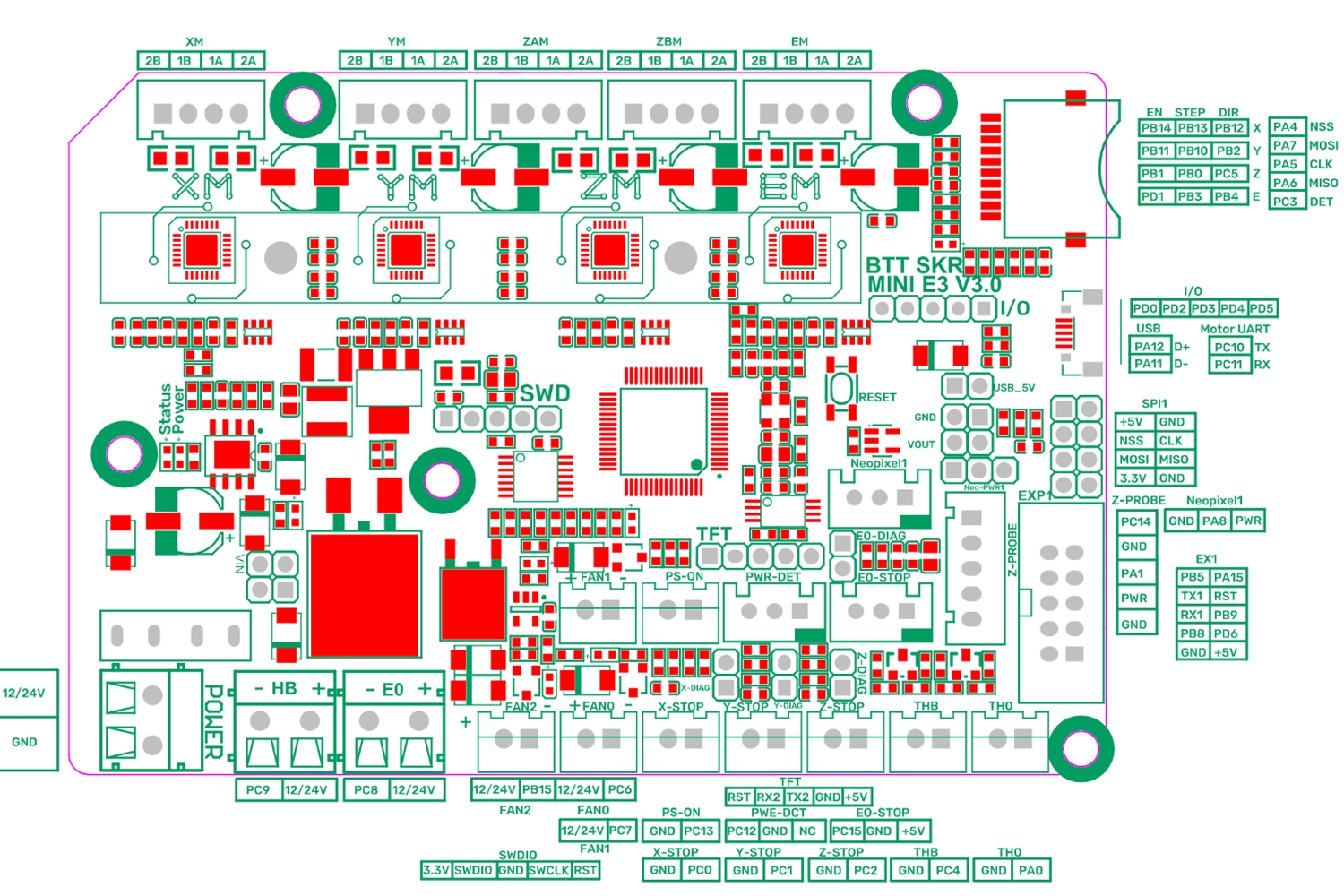
Ako odete na stranicu configuration.h u Exploreru s lijeve strane, vidjet ćete naredbu u liniji 70 koja specificira koja se matična ploča koristi. Mnoge ploče imaju samo jednu verziju, ali neke imaju varijante ili su neki pisači u prošlosti koristili različite ploče. Najbolje je otvoriti pisač i provjeriti koja je ploča instalirana.
Da saznate kako se točno zove vaša ploča u firmware-u, vratite se na explorer s lijeve strane, idite na src, core i boards.h. Ovo je popis svih ploča koje Marlin podržava. Zatim pritisnite CTRL F i unesite marku vaše ploče, za npr. Creality Ender 3 ploče unesite Creality. Pomaknite se prema dolje da preskočite sve što je povezano s ovom ključnom riječi i pronaći ćete Creality V4 ploče. Možete jednostavno koristiti Board_Creality_V4. Ovo je u osnovi isti postupak za bilo koju matičnu ploču bilo koje marke sve dok je podržava ova verzija Marlina. Ovdje također možete pronaći varijante procesora za ovu ploču, za verzije 4 ploče ovdje vidimo STM32F103RC i STM32F103RE.
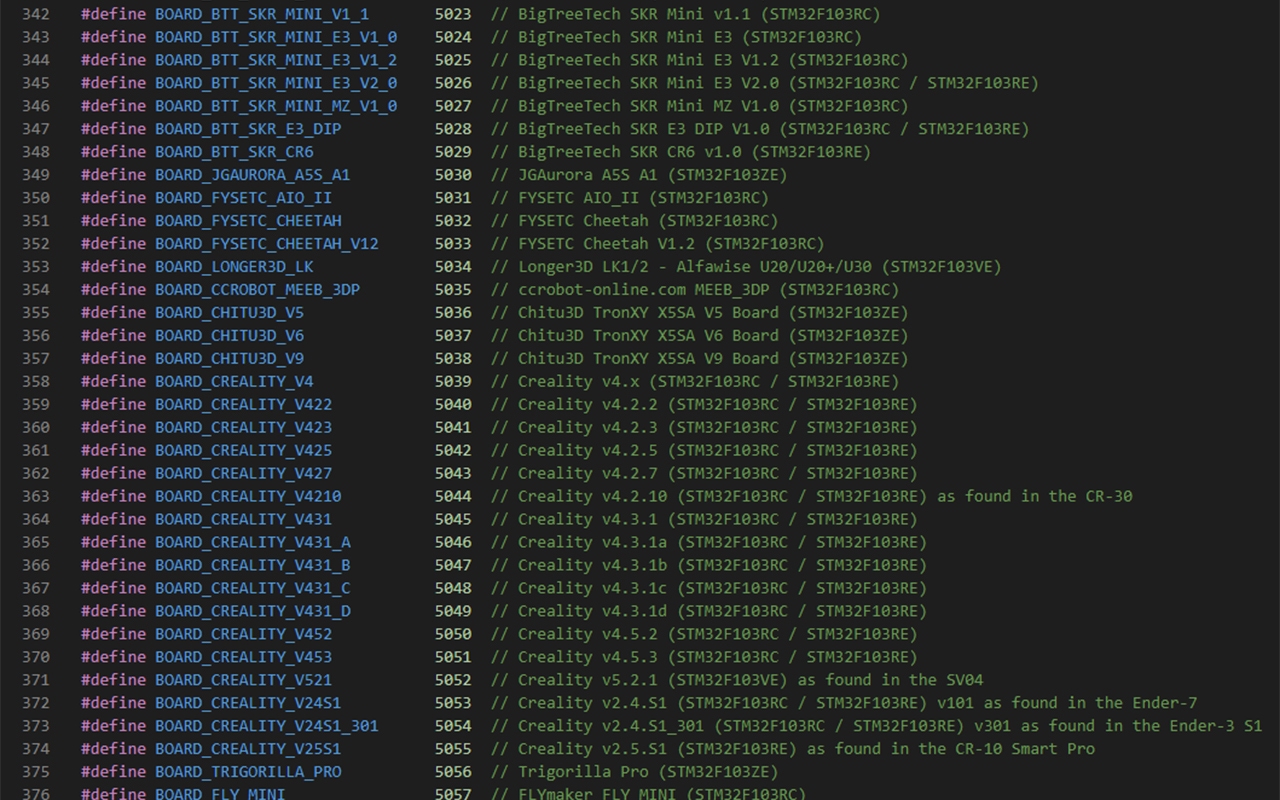
Zabilježite oboje, vratite se na Configuration.h i kopirajte ploču u područje iza #define MATIČNE PLOČE. Sada također možete otići na alatnu traku istraživača s lijeve strane i kliknuti na karticu platform.io kako biste bili sigurni da je ispravan model procesora u retku default_envs na vrhu stranice.
Ok, to je to, sada možemo urediti firmware. Postoje dvije glavne stranice koje ćemo urediti, većina njih u config.h, ali neke također u config_adv.h.
2. Serijski priključci, brzina prijenosa podataka, bluetooth, prilagođeni naziv
Ako odete na config.h, tamo možemo početi. Već smo završili s matičnom pločom, pa prijeđimo na sljedeću definiciju: serijski portovi.
Skoro svaki pisač koristi serijski priključak za povezivanje s raznim uređajima. U većini slučajeva koristit će se samo jedan, ali ako povezujete nešto drugo poput zaslona osjetljivog na dodir sa SD karticom ili USB priključkom, možda ćete morati malo eksperimentirati s njim. Ovdje to nećemo učiniti, pa zaboravimo to za sada.
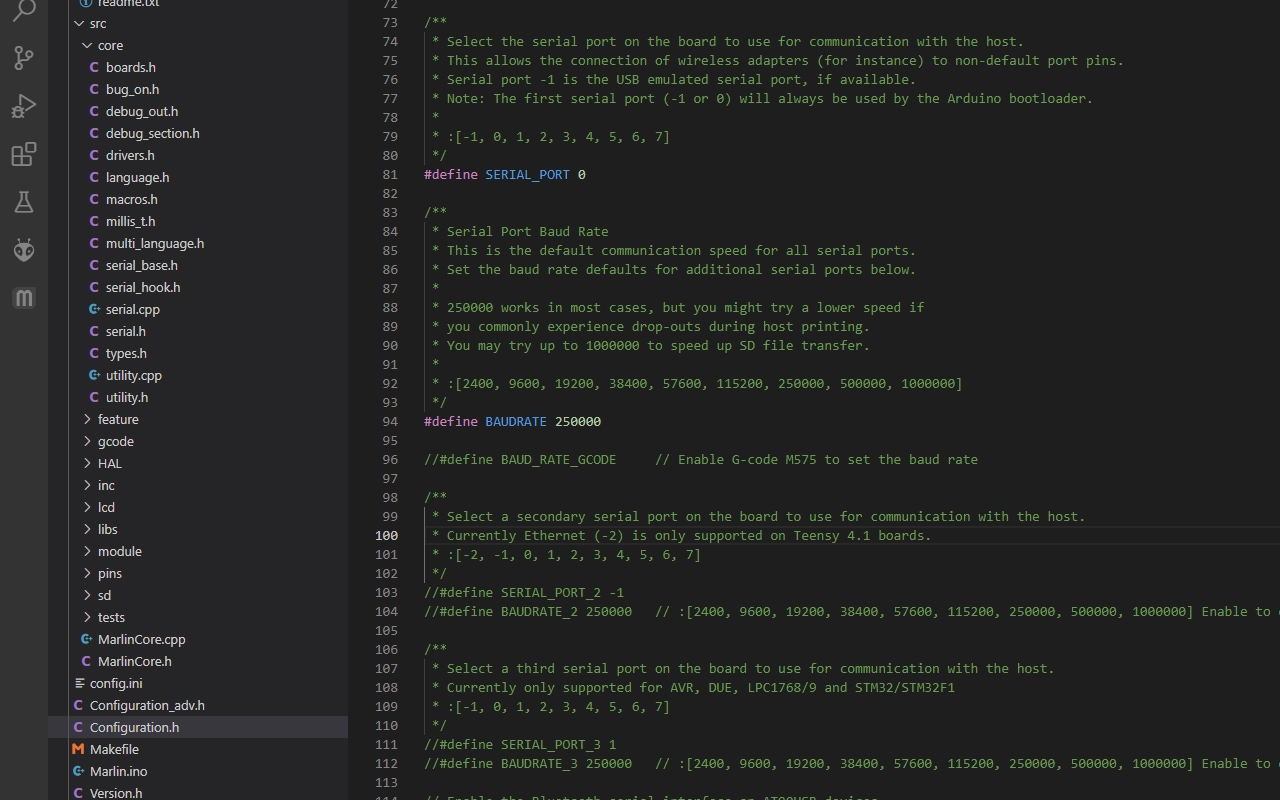
Brzina prijenosa je komunikacijska brzina za ove priključke. Može varirati, ali većina koristi brzinu prijenosa podataka od 115200.
Pogledajte dolje za više opcija serijskog priključka, ali možemo ostaviti nedefinirane informacije kakve jesu, jer vjerojatno nećete trebati dodatne serijske priključke.
Također postoje opcije za Bluetooth povezivanje, što je rijetkost za pisače, i opcija za promjenu naziva pisača, koja je prema zadanim postavkama isključena. Ovo ime možete vidjeti na LCD zaslonu kada je vaš uređaj uključen. Uključite opciju i unesite novo ime ako želite.
3. Stepper driver
Sljedeći su na redu stepper driveri. Zvuči teško, ali uopće nije. Svaki pisač koristi stepper drivere, oni upravljaju motorima. Pisači su koristili A4988 ili druge varijante, što je rezultiralo prilično bučnim motorima. Danas su TMC2208 ili TMC2209 instalirani kao standardni upravljački programi u većini pisača. Ali postoji čitav niz drugih pokretača s različitim svojstvima i prednostima, kao što su npr. postupno dijeljenje, maksimalna struja ili samonavođenje bez senzora gdje nisu potrebni fizički granični prekidači za samonavođenje osi.
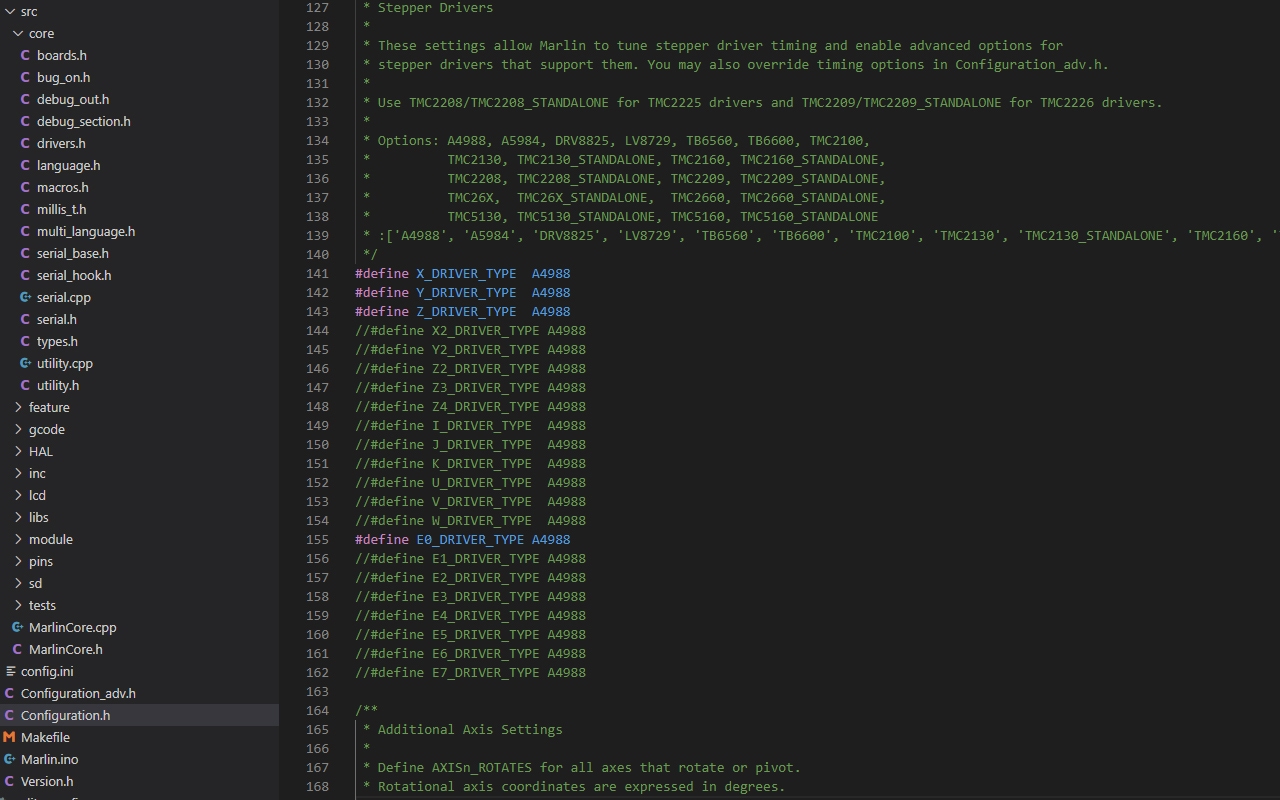
Možete jednostavno postaviti koji driver želite koristiti za koji pristup. Na matičnoj ploči pisača često se ne navodi koji se stepper driver programi koriste. Ponekad ploča koristi integrirane stepper driver programe, što znači da se ne mogu ukloniti. U ovom slučaju vjerojatno neće biti naznačeno koji se driver koristi, ali ponekad postoji oznaka na matičnoj ploči koja može pokazati koji se driver koristi. Na primjer, Creality V4 ploče imaju mali kod na konektoru SD kartice. Ako piše "T8", to znači da se koristi driver TMC2208. Neke matične ploče koriste drivere koji se mogu ukloniti, što ima prednost jer ako nešto pođe po zlu, možete ih jednostavno zamijeniti - ako se to dogodi s integriranim driverima, ploča je mrtva i potrebna vam je nova.
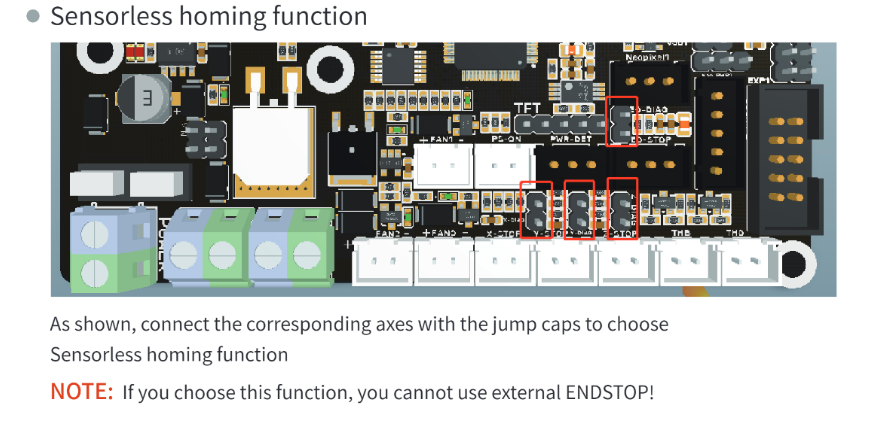
4. Homing bez senzora
Navođenje bez senzora mi se stvarno sviđa. Iako nije tako precizno kao fizički krajnji graničnici, smanjuje potrebu za kabelima, a ja stvarno ne volim kablove. Ne podržavaju svi upravljački programi navođenje bez senzora, npr. vrlo popularni upravljački programi TMC2208 ne mogu koristiti ovu funkciju. S druge strane, upravljački programi TMC2209 to mogu.
Za pokretanje samonavođenja bez senzora potrebne su neke fizičke izmjene na matičnoj ploči, ali ne brinite, one su stvarno jednostavne. To može varirati ovisno o matičnoj ploči, ali obično se samo kratkospojnici postavljaju na određene pinove. Pogledajte priručnik SKR Mini E3.
Što se tiče firmvera, evo što je potrebno za samonavođenje bez senzora: Prvo, HOMING_BUMP u retku 210 (configuration_adv.h) treba postaviti na 0 - to se obično koristi na krajnjim graničnicima gdje os udara u krajnji graničnik, povlači se malo unatrag i zatim polako ponovno dolazi do krajnjeg graničnika. Prema zadanim postavkama ovo je nekoliko mm, moramo ga isključiti.
U redu 1174, ENDSTOP_INTERRUPTS_FEATURE (configuration.h) mora biti nedefiniran.
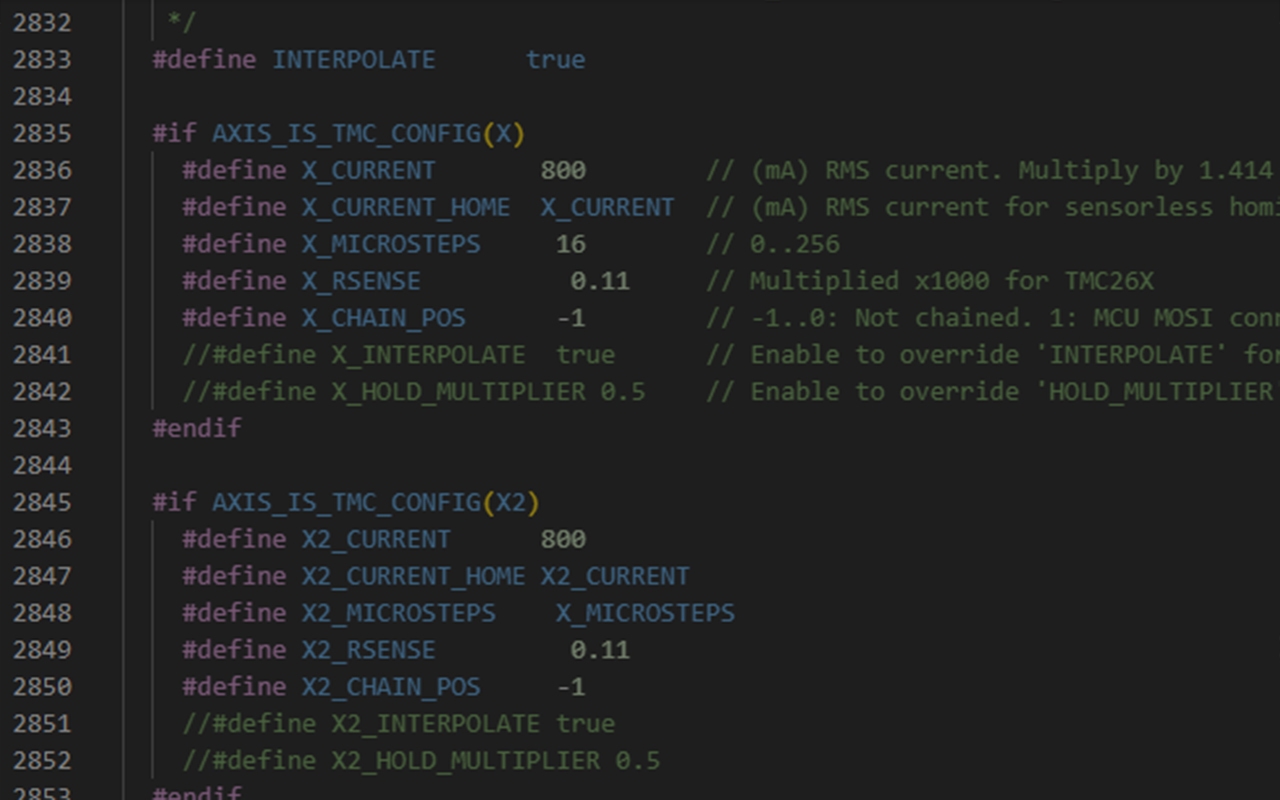
Sljedeća točka je struja. Lijepa stvar kod ovih matičnih ploča u usporedbi sa starijima je da se struja motora nije mogla promijeniti putem firmwarea na starim 8-bitnim pločama. Morali ste promijeniti Vref na glavnoj ploči okretanjem malog trimpota koji je bio vrlo osjetljiv. Okrenite ga malo previše i leti na 1.5, iako za većinu xy motora trebate samo 0.8 (ili 800mA). Možete pronaći linije za podešavanje struje počevši od 2386 (configuration_adv.h).
Struja koja vam je potrebna u vašem firmware-u ovisi o koračnom pogonu i motoru. Ako imate prilično prosječan motor poput motora 42-34, trenutna vrijednost ovdje treba biti samo 800. Ako pronađete tehnički list za svoj motor, mogli biste vidjeti da je najveća struja 1,5 A ili 1500 mA. Ali nemojte unijeti 1500 u firmware, to je apsolutna vršna vrijednost, mi ne radimo s vršnim vrijednostima, to bi loše završilo. Tražimo RMS vrijednost, korijen srednje vrijednosti kvadrata struje. Izračunavanje ispravne struje zapravo nije tako jednostavno, ali postoje kalkulatori kao što je ovaj od ALL3DP.
Upravljanje napajanjem ključno je kada kalibrirate samonavođenje bez senzora, jer ćete ga možda morati malo podesiti kako biste osigurali da radi optimalno.
MONITOR_DRIVER_STATUS je na liniji 3204 (configuration_adv.h) - ovo se koristi za povremenu provjeru upravljačkih programa kako bi se odredio njihov status. Marlin može automatski smanjiti struju pogona kada driver prijavi prethodno upozorenje na previsoku temperaturu. Pa uključi to.
Također možete omogućiti TMC_DEBUG na liniji 3317 (configuration_adv.h) gdje možete vidjeti više informacija o stepper driver programima.
U redu, sada možemo uključiti SENSORLESS_HOMING na liniji 3272 (configuration_adv.h), moramo to uključiti za X i Y i postaviti osjetljivost zastoja, to jest koliko osjetljivi upravljački programi mogu mjeriti zastoj, tj. kada motor pomiče glavu za ispis na jednu stranu svoje osi i udari u kraj. Ako je vrijednost preniska, neće osjetiti ništa i nastavit će okretati motor čak i ako ispisna glava udari bočno, ako je previsoka, stalno će "osjećati" zastoj čak i ako ispisna glava samo stoji tamo. Nakon bljeskanja firmvera, LCD sada ima izbornik u kojem možete promijeniti vrijednosti za osjetljivost zastoja i struju tako da samo trebate promijeniti vrijednosti kako bi odgovarale. Vrijednosti zastoja se kreću od 0-255, tako da bi prvi pokušaj trebao biti u sredini oko 128. Prilagodite vrijednost u skladu s tim, a zatim pokušajte ponovo i ponovo i ponovo. Ako zapnete i bez obzira koju vrijednost odaberete, jednostavno ne radi, tada morate prilagoditi struju, samo je malo povećajte. SAMO MALO!! Ako je 800 miliampera, povećajte ga na 850 i pokušajte ponovno.
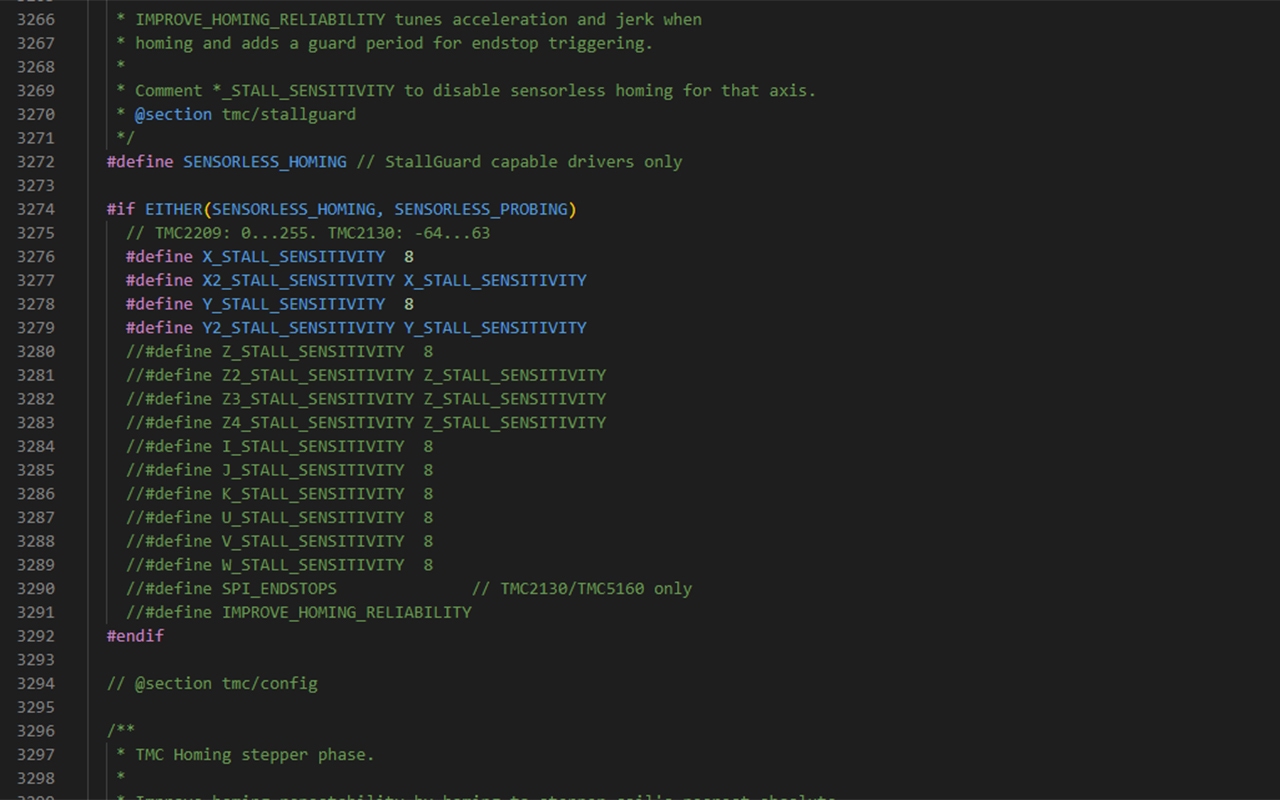
Također možete upotrijebiti definiranje IMPROVE_HOMING_RELIABILITY malo niže u liniji 3291, što je upravo ono kako zvuči.
U slučaju da se pitate, navođenje Z-osi bez senzora je teško, posebno za pisače koji koriste vretena za Z pomicanje, što većina pisača radi. Kako biste si uštedjeli probleme, nemojte uključivati samonavođenje bez senzora za Z-os.
5. Microstepping i stealthchop
U redu 2838 postoji još jedna funkcija pokretača X_MICROSTEPS (configuration_adv.h). Steper driveri kreću se u koracima, uglavnom 1,8 stupnjeva po koraku, što je vrlo precizno, ali može li biti preciznije? Osim dobivanja drugog motora koji ima manje mjerenje po koraku, može se koristiti microstepping, koje upućuje driver da signalizira motoru da se pomakne za manje od 1,8 stupnjeva, što je vrlo zgodno za vrlo precizno podešavanje. Zadana vrijednost je 16, ali možete ići i više, što naravno znači da će se promijeniti i broj koraka potrebnih za pomicanje motora na danu udaljenost. Zato Marlin ima ovu prekrasnu funkciju pod nazivom Interpolate na liniji 2833 (configuration_adv.h) koja će, ako je postavite na true, automatski "interpolirati" svaku vrijednost koraka motora, tako da ne morate ništa mijenjati ručno. Dakle, ako promijenite mikrokorake sa 16 na 32, morat ćete prilagoditi korake za sve motore kako bi odgovarali novoj vrijednosti. Ako omogućite interpolaciju, to se događa automatski.
Sljedeća točka je STEALTHCHOP na liniji 3140 (configuration_adv.h). Uključite ovo, sve će biti super tiho - trebali biste označiti i CHOPPER_TIMING CHOPPER_DEFAULT ispod. Najvjerojatnije imate pisač od 24 V, pa ga namjestite na 24 V. Naravno, mogućnost korištenja stealthchopa također ovisi o vašem upravljačkom programu, ali srećom većina to danas može podnijeti.
6. PSU kontrola
Nazad u Configuration.h, na liniji 388 nalazimo PSU kontrolu (configuration.h), koja može biti zanimljiva ako želimo automatski isključiti naš pisač nakon dovršetka ispisa.
7. Termalne postavke - termistor i maks./min. tem
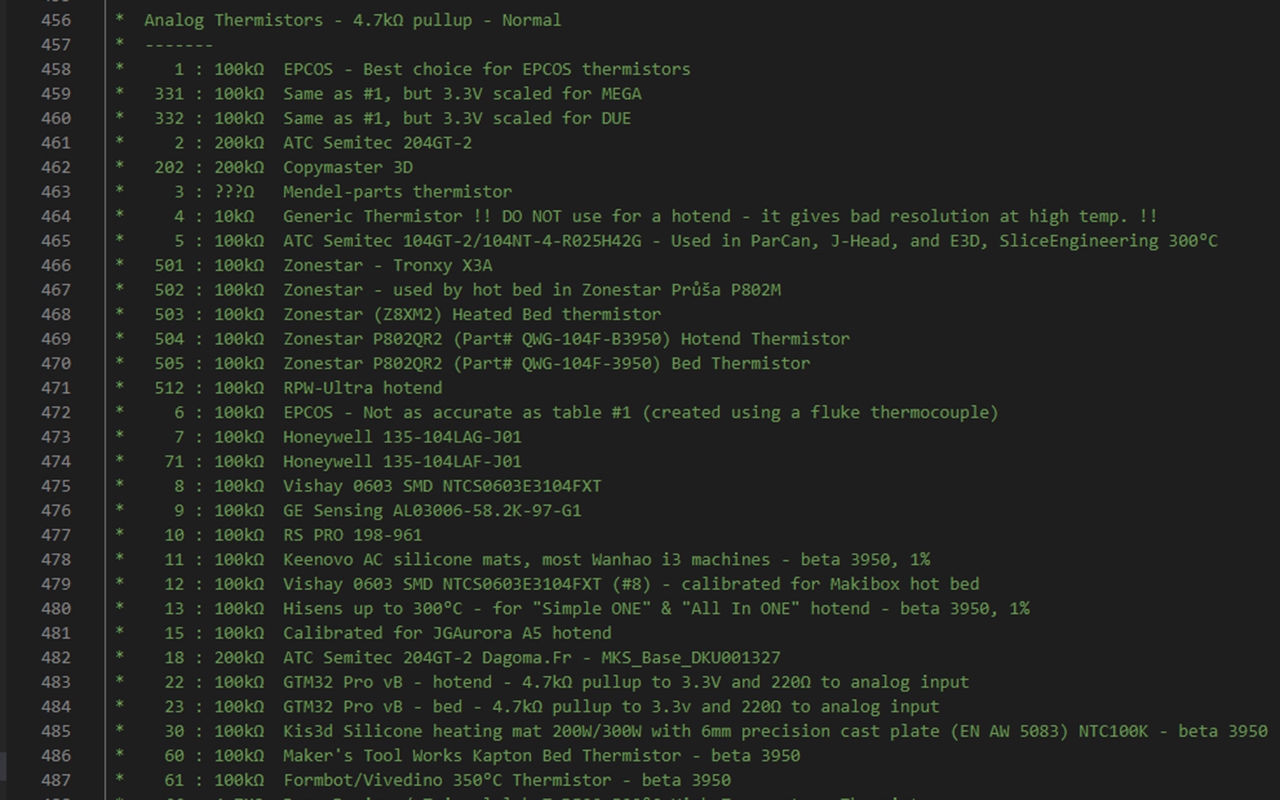
Sljedeće su termalne postavke na liniji 430 (configuration.h), a ovo je vjerojatno najtraženiji vodič za firmver. Za mnoge ljude, nadogradnja hotenda je prva promjena koju naprave. Dakle, ako imate Ender 3 i želite nadograditi na Revo hotend, što ćete učiniti? Pa postoje dvije stvari koje treba promijeniti, prva je termistor. Većina pisača koristi termistor od 100k, što je vrsta senzora u Marlinu "1". Međutim, Revo i mnogi drugi termistori koriste broj 5 koji je također termistor od 100k, ali od Semiteca. Kao što vidite postoji nekoliko marki koje koriste ovu vrstu termistora. Ali možda želite nadograditi na nešto moćnije poput PT1000? Ovisi o PT1000, ali većina koristi senzor pod brojem 1047 s povlačenjem od 4,7 ohma.
Za temp_sensor_bed u retku 536 (configuration.h) možete učiniti isto .
Drugi dio nadogradnje hotenda je HEATER_0_MAXTEMP na liniji 611 (configuration.h). PTFE žarulje općenito su ograničene na 260C, što je navedeno kao 275C u Marlinu. Nisam siguran zašto je to učinjeno, ali bez obzira koju temperaturu ovdje unesete, stvarna dosegljiva temperatura vašeg pisača bit će 15 C niža. Dakle, ako imate hotend od 300C, najmanje 315C mora biti uneseno kao maksimalna vrijednost.
Na liniji 597 također ćete pronaći HEATER_0_MINTEMP, koji će automatski isključiti grijač kada dosegne ovu temperaturu. Usput, ako imate pisač koji isključuje grijač ili prikazuje pogrešku mintemp, a niste sigurni zašto, to može biti zato što je vaš pisač u okruženju koje je prehladno. Tijekom zime dobivamo puno pitanja o tome jer puno ljudi ima svoje printere u garaži i to se lako može dogoditi.
Na retku 623 imate termalno prekoračenje (configuration.h) koje dopušta temperature iznad Maxtemp vrijednosti prije isključivanja uređaja. Prekoračenje se može dogoditi ako vaš grijač nije kalibriran, što nas dovodi do linije 633 i PID podešavanja (configuration.h).
8. PID postavke
Ovime se sinkroniziraju grijač i termistor tako kako bi grijač bio točan. Najvažnija stvar ovdje je linija 659, koja daje zadane vrijednosti za Proporcionalno, Integralno i Derivativno. Ovdje zapravo ne morate ništa mijenjati, ali ako mijenjate grijače, dobra je ideja pokrenuti PID podešavanje, koje u biti kalibrira vaš grijač ili termistor tako da temperatura ne oscilira previše dok vaš pisač radi. Stoga bih preporučio da to učinite nakon nadogradnje hotenda. Postoji nekoliko načina da to učinite, ali jednostavan način je da to omogućite u svom LCD izborniku na liniji 803. Druga bi metoda bila povezivanje pisača s računalom putem USB-a i korištenje terminalskog programa poput Pronterfacea.
U ovom terminalu možete unijeti gcode naredbe. Ispravna naredba za podešavanje PID-a je "M303 E0 S210 C10 U".
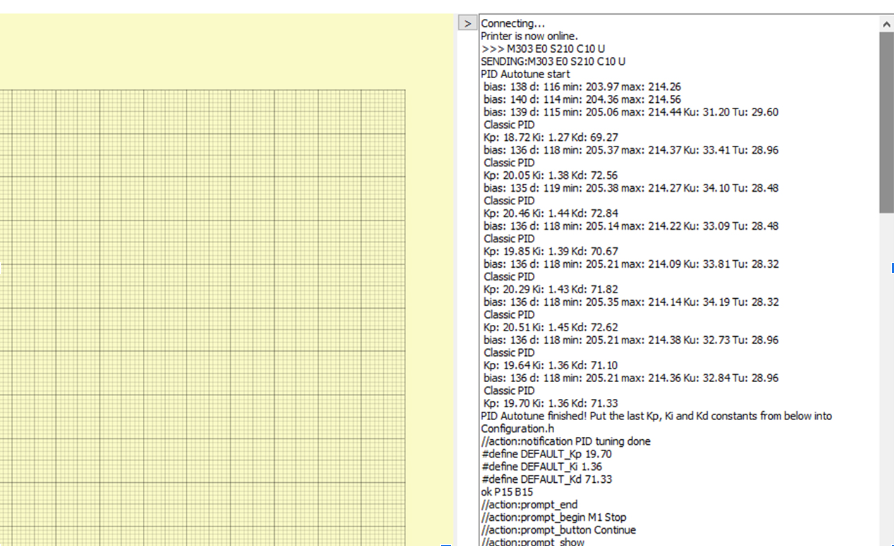
Ovdje je M303 naredba za pokretanje procesa ugađanja.
E0 se odnosi na korišteni grijač (E0 je zadana vrijednost za gotovo sve pisače s jednim ekstruderom).
S210 se odnosi na temperaturu od 210C koja je prikladna za PLA, ali je možete promijeniti ako uglavnom želite koristiti druge filamente.
C7 označava koliko često treba provoditi test. Što više puta provodite test, to je točniji, ali otkrili smo da nije potrebno više od 7 pokušaja.
Nakon što unesete ovu naredbu, test će se pokrenuti i izbaciti vrijednosti za Kp, Ki i Kd.
Kada imate te vrijednosti, možete ih unijeti u terminal pomoću naredbe M301, kao što je M301 P30 I3 D60.
Zatim spremite svoje postavke naredbom M500 i gotovi ste.
Ima još više o PID upravljanju kreveta i ormarića. PID postavka za vaš krevet nije toliko potrebna kao ona za vaš hotend. Hotends se mijenjaju puno češće od termistora uz krevet, ali on je tu kada ga trebate uključiti.
9. Sigurnost - hladna ekstruzija i toplinski odvod
Sljedeća bitna točka je zaštita od toplinskog proboja u liniji 827 (configuration.h), koju svakako trebate uključiti! Ovo isključuje pisač ako temperatura poraste iznad očekivane razine. Možda se termistor pomaknuo, a vi to ne znate. Bez ove funkcije, temperatura nastavlja rasti i vrijednost termistora gotovo se ne mijenja. To je loše. UKLJUČITE GA!
Također postoji funkcija za sprječavanje hladnog istiskivanja na liniji 816 (configuration.h). Ovo će spriječiti da se motor ekstrudera aktivira kada je temperatura ispod unesene vrijednosti. Ovdje je prema zadanim postavkama postavljena vrijednost 170. Koji filament obično koristite sa svojim pisačem će vam reći koju vrijednost ovdje koristiti. Na primjer, ako uglavnom ispisujete PETG, trebali biste postaviti temperaturu od oko 220C.
10. Mehaničke postavke - corexy, belt printer, robotska ruka
Slijedi mehanička postavka, a budući da ćemo koristiti Corexy postavu, to je vrlo važno. Ovdje moramo definirati Corexy.
Ovdje postoje i druge kinematike kao što su delta, belt printeri ili ako imate robotsku ruku, to je također moguće ovdje.
11. Endstopp postavke i Endstop Noise Threshold
Sljedeće su endstop postavke u retku 1071 (configuration.h). Ovdje se krajnji graničnici jednostavno aktiviraju.
Evo još jedne male značajke za Endstop Noise Threshold. Prije mnogo vremena morao sam upotrijebiti ovu značajku kada sam htio pričvrstiti ekstra dugačke kabele na pisač tako da sva elektronika bude izvan kućišta. Iz nekog razloga dugi kabeli uzrokovali su otkrivanje pogrešaka tijekom navođenja, ali ova značajka mi je spasila dan.
12. Postavke kretanja - ubrzanje, koraci, feedrate, jerk, junction deviation, linear advance
Sljedeće su postavke kretanja na 1194 (configuration.h) i prije svega zadani koraci. Kao što je spomenuto, koračni motori se okreću u koracima svakih 1,8 stupnjeva (osim ako nemate motor od 0,9 stupnjeva). Kada motor okreće remen, vodeći vijak ili zupčanik, mora napraviti određeni broj koraka kako bi se dio pomaknuo željenu količinu. Najčešći način da se to promijeni je za nadogradnju ekstrudera, gdje zapravo samo trebate promijeniti broj u tom retku. Proizvođači obično navode korake ekstrudera (ili esteps), ali ih je možda potrebno prilagoditi, zbog čega radimo kalibraciju koraka. O tome ima mnogo videa.
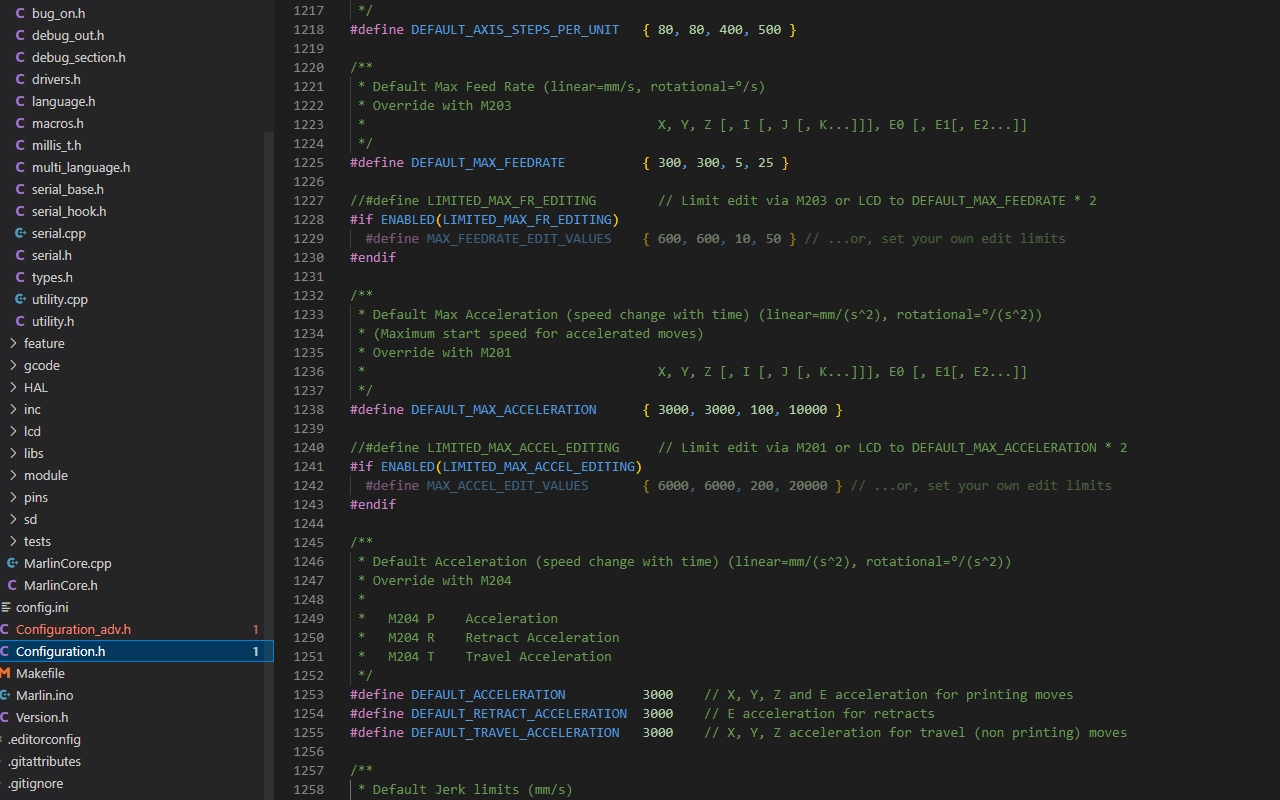
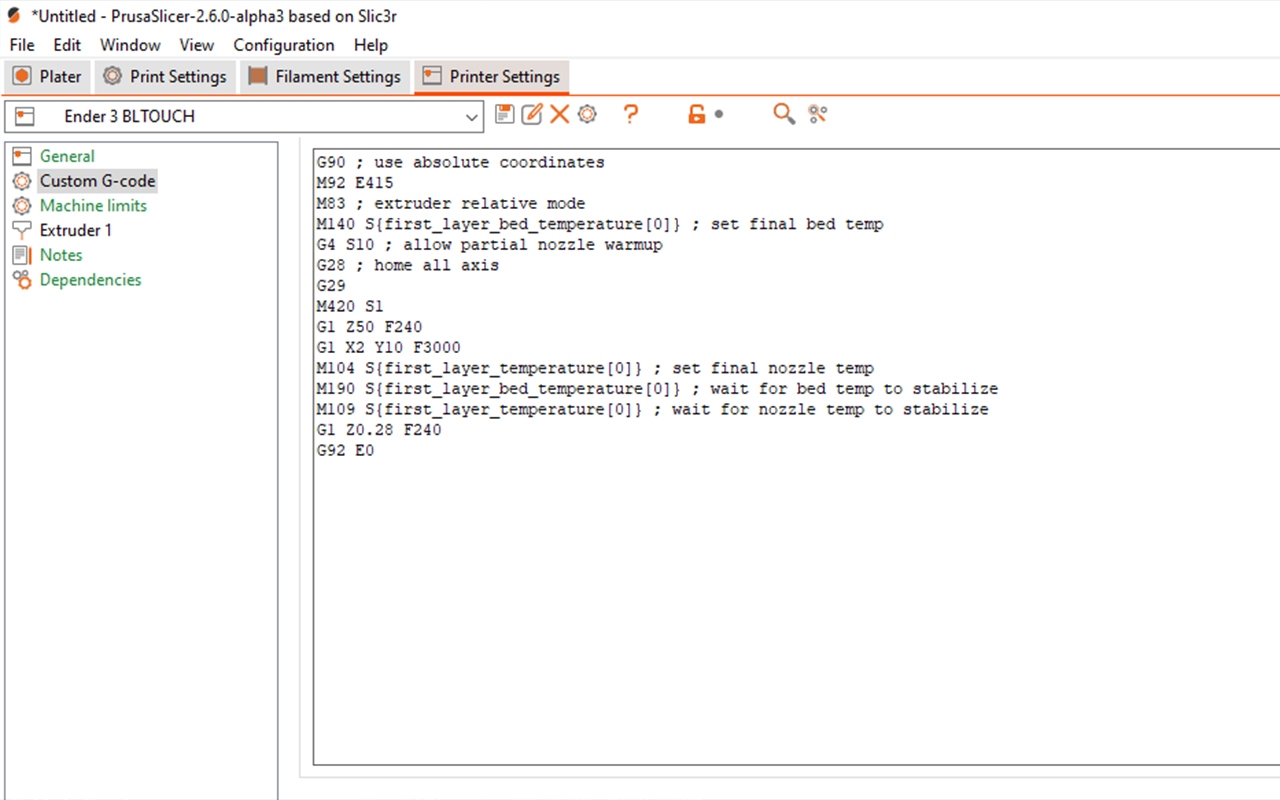
Esteps i zapravo sve vrijednosti koraka ne moraju se konfigurirati u firmveru, možete jednostavno urediti svoj startni gcode da biste umetnuli novu vrijednost pomoću naredbe M92. Ovo je najlakši način kada nadograđujete svoj ekstruder, u većini slučajeva ne morate ažurirati svoj firmware, možete samo koristiti Gcode ili u svom rezaču ili putem Pronterface-a kao što smo već pokazali. To se zapravo može učiniti za sve vrijednosti u kategoriji Postavke pokreta s M203 za maksimalnu brzinu napredovanja, M201 za maksimalno ubrzanje, m204 za zadano ubrzanje i M205 za postavke trzaja. Na primjer, ako želite promijeniti korake ekstrudera za novi Bondtech ekstruder, samo morate napisati M92 E415 u početni gcode (M92 je naredba za promjenu koraka motora, a E označava da je to motor ekstrudera), to je to. Dakle, ove vrijednosti nisu uklesane i mogu se lako promijeniti bez promjene firmvera.
Usput, ako vas zanimaju gcode naredbe općenito i parametri koji se s njima koriste, možete provjeriti Marlin web mjesto koje ima popis svih gcode naredbi, od kojih bi neke mogle biti vrlo korisne. Ovdje je primjer za M204 Takeoff Acceleration Gcode..
Jerk je značajka koja ograničava brzinu promjene akceleracije osi, posebno kada ispisna glava miruje, a zatim se iznenada počne pomicati, ali i tijekom rotacije od 90 stupnjeva. To je relativno stara značajka u firmware-u koju mnogi pisači još uvijek koriste, ali noviji pisači, posebno oni s Klipper firmware-om, koriste nešto što se zove Junction Deviation, pa hajde da vidimo i to.
Što se tiče promjena firmvera, ovo je vrlo jednostavno: idite na liniju 1288 i definirajte odstupanje spoja. Također provjerite da classic_jerk nije definiran na liniji 1265 (configuration.h). To je dio firmvera gotov, ali još uvijek morate otkriti vrijednost za odstupanje spoja. Prema zadanim postavkama postavljena je na 0,013 mm, ali to u potpunosti ovisi o vašem pisaču. Srećom, to je jednostavan test, sve što trebamo učiniti je ispisati model gdje svaki sloj ima malo drugačiju vrijednost odstupanja spoja i zatim vidjeti koji sloj najbolje ispisuje. Ako primijetite jako zvonjenje, vrijednost je previsoka. Ali ne smije biti ni prenizak jer bi to usporilo proces.
TeachingTech ima izvrstan vodič i kalkulator.
Sljedeće je ubrzanje S-krivulje na liniji 1301 (configuration.h) koje smanjuje vibracije i kako je značajka trzaja relativno stara i odložena u korist novih značajki. Jedan od njih je Linear Advance. Što je to? To kontrolira brzinu ekstrudiranog volumena kako se ubrzanje mijenja. Kada ispisujete kutove od 90 stupnjeva, jeste li ikada primijetili da se ispis tamo malo zakrivljuje? To je upravo ono što Linear Advance želi popraviti.
Što se tiče firmwarea, sličan je Junction Deviation. Idite na liniju 2205 u configuration_adv.h i pronaći ćete ga (configuration_adv.h). Sve što trebate učiniti je odkomentirati ga tako da bude definiran. Nakon toga morate ga kalibrirati kako biste pronašli točnu vrijednost. Zovemo je k-vrijednost, prema zadanim postavkama iznosi 0,22.
Kalibracija k vrijednosti slična je kalibraciji vrijednosti odstupanja spoja, ispisujemo nešto s različitim vrijednostima i vidimo koja najbolje funkcionira. Srećom, Marlin ima apsolutno briljantan kalkulator koji se može koristiti za sve ovo izračunavanje.
13. Z-sonda i niveliranje kreveta
U redu 1311 dolazimo do niveliranja korita i Z-sondi (konfiguracija.h). Ovo je vrlo opširan odjeljak jer postoji mnogo različitih metoda izravnavanja, ne samo dodaci za automatsko izravnavanje, već i mnoštvo drugih stvari. Ako ste zainteresirani za učenje o firmware-u BLToucha ili sličnih uređaja, preporučujem TeachingTech video o tome kako BLTouch radi na gotovo svim uređajima.
Treba li se smjer vašeg motora obrnuti? Ponekad je to potrebno za nadogradnju ekstrudera ili promjenu upravljačkog programa steppera. Postoje mnoge značajke u Marlinu koje zahtijevaju promjenu smjera, ali to ne morate učiniti sada. Kada kompajlirate i flashate svoj firmware, samo pokušajte pomaknuti motor i vidjeti radi li u pravom smjeru. Ako trebate promijeniti smjer, idite na liniju 1698 i promijenite INVERT_[X/Y/Z]_DIR u false ili true.
14. Veličina kreveta und filament runout senzori
Sljedeća stavka u retku 1753 (configuration.h) je veličina kreveta. Kreveti bi trebali imati malo prostora za pomicanje jer ne želimo da se naš model ispisuje preblizu ruba kreveta, tako da možemo postaviti svoj min_position na 0, što će biti točka na kojoj se zaustavlja kraj ili se kreće bez senzora osi kada se automatsko navođenje zaustavi. Možda je krajnja točka već na razumnoj udaljenosti od ruba kreveta ili možda nije čak ni na krevetu. U ovom slučaju treba vam manevarski prostor pa samo uredite min_position u mm da uključite svoj manevarski prostor, a zatim pomaknite klizač na suprotnu stranu kreveta do točke kraj koje ne želite da prođe, a to je vaš max_postion koji je točka do koje su svi pokreti ograničeni.
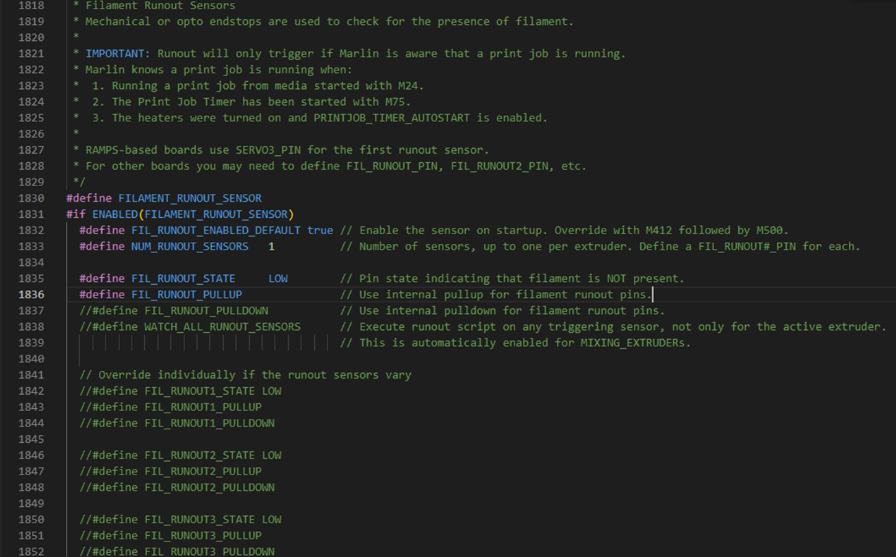
Sljedeći su filement ronout senzori u redu 1818 (konfiguracija.h). Najlakši način za postavljanje senzora odstupanja je korištenje uobičajenog graničnika s malim valjkom na kraju. Ova uloga je prilično važna jer kada izvučete filament, metalna traka će se saviti ili čak slomiti, čineći prekidač neupotrebljivim ili nepouzdanim. Postoje i druge opcije poput opto senzora za koje mislim da su mnogo pouzdaniji. Nikada nisam imao problema sa senzorom na Prusa MK3, ali endstop senzore je lako dodati, jeftini su i s pravim dizajnom mogu jako dobro raditi. Dakle, ako želite upotrijebiti jedan, a zatim poništite komentar filament_runout_sensor na retku 1830, trebali biste imati omogućen #define FIL_RUNOUT_ENABLED_DEFAULT i postaviti ga na true i potreban vam je samo 1 osim ako nemate dvostruki ekstruder pa postavite #define NUM_RUNOUT_SENSORS na 1, svakako biste trebali imati aktiviranu naredbu M600 (više o tome malo kasnije) pa prijeđite na liniju 1877 (configuration.h).
Također trebate otići na ADVANCED_PAUSE_FEATURE u liniji 2752 (configuration_adv.h) i ukloniti komentar. Postoji mnogo drugih podešavanja koja možete napraviti ovdje, a Marlin je uz to stavio neke vrlo korisne, lako razumljive komentare. Mijenjajte ih kako želite i prilagodite svom pisaču.
Sve što sada trebate učiniti je spojiti ploču. Ovisno o vašoj ploči, možete je i promijeniti ako želite. Da biste provjerili gdje je zadani pin, možete ići na SRC, PINS i svoj model procesora, odaberite ga i pritisnite CTRL F i upišite FIL_RUNOUT_PIN, na našem BTT SKR e3 Mini V3.0 pin je PC15, idite na Google i upišite svoj naziv ploče i dijagram pinouta i pogledajte gdje je taj pin.
15. M600
Već smo spomenuli naredbu M600. Ovo je nažalost nedovoljno korištena, ali vrlo korisna značajka firmvera, naime mijenjanje filamenta tijekom ispisa. Ako želite ispisati prvih nekoliko slojeva u jednoj boji, sljedećih nekoliko u drugoj, a zatim se boje stalno iznova žele mijenjati, možete učinite to s ovom funkcijom. Pogledajte ovu naljepnicu koju smo napravili pomoću naredbe M600.

Dakle, već smo omogućili M600 i naprednu funkciju pauze, sada moramo omogućiti funkciju parkiranja ispisne glave. Dakle, idite na liniju 2362 (configuration.h) i omogućite "nozzle park". Ovdje možete promijeniti položaj ako želite, kao i brzinu pod "feedrate" i "minimum z feed rate".

Sada idite na liniju 824 i omogućite Extrude max length (configuration.h). Ovo će dovesti novi filament do ove duljine, što je dovoljno za uklanjanje starog filamenta i potpunu promjenu boje. Ova vrijednost ovisi o tome imate li bovden sajlu ili direktni pogon. Ako imate bovden sajlu s dugom PTFE cijevi, ta vrijednost mora biti dosta visoka, kod direktnog pogona može biti niska.
Zatim se vratite na značajku napredne pauze u configuration_adv.h i provjerite je li PARK_HEAD_ON_PAUSE bez komentara tako da je mlaznica ispravno parkirana (configuration_adv.h).
16. Dodatne značajke - EEPROM, postavke predgrijanja, čišćenje mlaznica, mjerač vremena ispisa, lozinka, jezik, podrška za SD karticu, osjetljivost kodera, zvučnici, LCD-i, neopixeli
Sljedeća stavka je EEPROM na liniji 2291 i svakako bi trebala biti omogućena (configuration.h) - to je kao značajka memorije na vašem pisaču. Dakle, ako nešto promijenite, zapravo bilo što s Gcode naredbom, to možete spremiti s M500 naredbom i to će ostati. Bez ove značajke, pisač će se jednostavno ponovno pokrenuti s postavkama firmvera koje ste postavili na računalu. To stvari čini stvarno praktičnima.
Sljedeće su konstante predgrijavanja u retku 2335 (configuration.h). Kao i kod EEPROM-a, trebali bi biti tamo prema zadanim postavkama, iako ponekad vrijednosti nisu sjajne. Sviđa mi se kada su ti brojevi malo viši od stvarne temperature ispisa, ali to je samo sporedna stvar. Prema zadanim postavkama samo su temperature PLA i ABS unaprijed postavljene, ali ako zapravo ne koristite nijednu ili vam treba mnogo unaprijed postavljenih postavki, može se dodati do 10.
Sljedeća je funkcija čiste mlaznice u retku 2374 (configuration.h). Ovo je korisno za pisač s dva ekstrudera, ali može biti korisno i za pisač s jednim ekstruderom ako želite da prvi sloj bude savršen.
Sljedeća je lozinka na liniji 2498 (configuration.h) - možda ne želite da npr. vaše dijete ili cimeri koji ne poznaju granice koriste pisač. Zaštita lozinkom bi u tom slučaju mogla dobro doći, ali ako ste jedini s pristupom pisaču, lozinka je prilično beskorisna.
Također imamo postavke za LCD podršku na liniji 2529 (configuration.h). Ako engleski ili kineski nije vaš prvi jezik, to nije problem, ovdje imate nekoliko na izbor. Ako vaš kontroler koristi kotačić kodera, možete promijeniti osjetljivost na liniji 2602 (configuration.h). Dalje u postavkama kontrolera možete odabrati svoj kontroler, možda onaj s podrškom za SD karticu ili onaj sa zaslonom osjetljivim na dodir.
Također možete nadograditi svoj pisač s Neopixelima, LED diodama koje možete pričvrstiti na svoj pisač kako biste stvorili bolje osvjetljenje ili kul svjetlosni šou. Ove postavke možete pronaći u retku 3450 (configuration.h).
Konačno, tu je nova i vrlo zgodna značajka, a to je Input Shaping. To je nova značajka u Marlinu koja može ublažiti vibracije koje mogu uzrokovati ružne nedostatke u vašem ispisu. Već smo izradili video i vodič koji će vam pomoći u postavljanju.
Ovaj popis nipošto ne pokriva sve, već samo daje pregled općenito koje se promjene često rade. Ako imate problema s određenim dijelom firmvera Marlin ili želite dodatak ovom popisu, javite nam. U budućnosti ćemo proširiti ovaj vodič kako bismo vam pomogli sa svim promjenama koje biste željeli napraviti.
Zadnje ocjene
-

Formfutura ApolloX™ Light Grey, 1,75 mm / 2300 g
- uz visoke performanse
- za inženjersku upotrebu
- otporan na UV i vremenske uvjete
-
3DJAKE ABS White, 1,75 mm / 1000 g
- proizvedeno u EU
- visoka mehanička stabilnost
- usporava gorenje prema UL 94 HB
-

Twotrees Glodalo s premazom od titana, set od 10 komada, 0,8 - 3,175 mm
- od tvrdog metala
- s premazom od titana
- visoka tvrdoća i otpornost na habanje
-
Twotrees TTC450 Pro CNC glodalica
- izdržljiva konstrukcija
- radna površina 460 x 460 x 80 mm
- točnost graviranja 0,05 mm
